人工知能アルゴリズム及び立体視覚技術を通じて、顕揚科技は以下のソリューションを提供する。
ダイナミック無秩序ピックアップ-高速三次元マシンビジョン
散乱無秩序なワークに対して専門的に設計し、ロボットに協力して3Dスマートキャプチャを実現します。ワークの3Dデータをスキャンして三次元精密位置を測定することを実現し、機器アームをガイドして正確にワークをつかみ、産業用ロボットの自動化を実現しました。
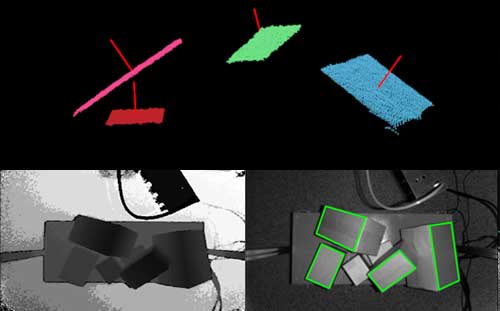
ビンロウ三次元認識と位置つけ-ビンロウ生産ライン自動化
自主開発の高速高精細3Dカメラで生産ラインのビンロウを撮影し、その3Dスキャン情報を取得し、三次元データを取得してロボット本体を導いって相応の操作をさせます。

動作捕捉-顕揚科技高速三次元イメージング設備
顔認識、姿勢認識に対して高速高精細三次元マシンビジョン装置はリアルタイムで三次元データ操作が可能です。
